Laatst bewerkt door een moderator:
Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Edge Dlg
- Topicstarter Lyckele
- Startdatum
@Berrie,
Zeer goed werk maar je hebt niet laten zien hoe je de vorkjes die in de servo armen grijpen gemaakt hebt.. en zijn deze ook niet te dik geworden? Waarom niet gewoon een koolstof buisje over het midden van de servo arm en dan de armen uit het buisjs slijpen zodat er twee buis gedeelten om de servo armen vallen.. dit kan dus in een kleinere dikte.. Verder moet je er rekening mee houden dat de torsiebuis nooit tegen de servo armen mag drukken tijdens het gebruik.. dat kan nl. leiden tot beschadiging van de potmeter in de servo.
Zeer goed werk maar je hebt niet laten zien hoe je de vorkjes die in de servo armen grijpen gemaakt hebt.. en zijn deze ook niet te dik geworden? Waarom niet gewoon een koolstof buisje over het midden van de servo arm en dan de armen uit het buisjs slijpen zodat er twee buis gedeelten om de servo armen vallen.. dit kan dus in een kleinere dikte.. Verder moet je er rekening mee houden dat de torsiebuis nooit tegen de servo armen mag drukken tijdens het gebruik.. dat kan nl. leiden tot beschadiging van de potmeter in de servo.
Hoi Berrie,
Al het carbon/glas wat je nu om de TIG staaf hebt gewikkeld, dient er dus eigenlijk alleen maar voor om de torsiestijfheid van die staaf te vergroten?
In hoeverre is dat eigenlijk belangrijk? Voor de normale flap bewegingen kan het nauwelijks relevant zijn. Maar mogelijk dat de kans op flutter toeneemt? Flutter kan het gevolg zijn van een servo aansturing met speling, maar kan dat ook door torsie in een staaf staal van een paar cm lengte?
De 6 cm RVS 1,5 mm in mijn RDS systeem heb ik gewoon zo gelaten. Ik kan me eigenlijk niet voorstellen dat de torsie in zo'n asje zodanig is dat het tot problemen leidt, maar misschien maak ik hierin een vergissing...
Groet, Patrick
Al het carbon/glas wat je nu om de TIG staaf hebt gewikkeld, dient er dus eigenlijk alleen maar voor om de torsiestijfheid van die staaf te vergroten?
In hoeverre is dat eigenlijk belangrijk? Voor de normale flap bewegingen kan het nauwelijks relevant zijn. Maar mogelijk dat de kans op flutter toeneemt? Flutter kan het gevolg zijn van een servo aansturing met speling, maar kan dat ook door torsie in een staaf staal van een paar cm lengte?
De 6 cm RVS 1,5 mm in mijn RDS systeem heb ik gewoon zo gelaten. Ik kan me eigenlijk niet voorstellen dat de torsie in zo'n asje zodanig is dat het tot problemen leidt, maar misschien maak ik hierin een vergissing...
Groet, Patrick
Berrie
Vriend van modelbouwforum.nl
@Berrie,
Zeer goed werk maar je hebt niet laten zien hoe je de vorkjes die in de servo armen grijpen gemaakt hebt.
Ik heb hier idd geen directe foto van gemaakt. Dit is wat ik gedaan heb:
- Staafjes Ø1.2mm maken van zo'n 20mm lang. Deze passen precies in de gaatjes van de D60 servohevel.
- Het hele zaakje in de mal leggen en de servobevestiging omwikkelen/verweven met 1K HT roving.
De 1K roving wordt dus gewikkeld om de staafjes Ø1.2 en de carbon torsiestaaf.
Een plaatje van voor het wikkelen:

Waarom niet gewoon een koolstof buisje over het midden van de servo arm en dan de armen uit het buisjs slijpen zodat er twee buis gedeelten om de servo armen vallen.. dit kan dus in een kleinere dikte..
Ik kan niet visualiseren wat jij bedoelt.... maar houdt in gedachten dat ik spul wilde gebruiken dat rondzwierf in mijn hobbyruimte. Het kan dus altijd anders/beter.
Verder moet je er rekening mee houden dat de torsiebuis nooit tegen de servo armen mag drukken tijdens het gebruik.. dat kan nl. leiden tot beschadiging van de potmeter in de servo.
.. en zijn deze ook niet te dik geworden?
Even een inbouwplaatje, dat geeft de verhoudingen denk ik beter voor je weer:

Naar mijn smaak is de lengte iets te kort uitgevallen... Meer ruimte tussen de servobevestiging als ik me wenste, maar goed genoeg.
Laatst bewerkt:
Berrie
Vriend van modelbouwforum.nl
Al het carbon/glas wat je nu om de TIG staaf hebt gewikkeld, dient er dus eigenlijk alleen maar voor om de torsiestijfheid van die staaf te vergroten?
Het glas dient alleen om het carbon bij elkaar te houden tijdens het wikkelen. En idd probeer ik met het carbon de torsiestijfheid zo groot mogelijk te krijgen. Verder moet je 'vlees' hebben om een bevestiging richting de servo te kunnen maken.
In hoeverre is dat eigenlijk belangrijk? Voor de normale flap bewegingen kan het nauwelijks relevant zijn. Maar mogelijk dat de kans op flutter toeneemt? Flutter kan het gevolg zijn van een servo aansturing met speling, maar kan dat ook door torsie in een staaf staal van een paar cm lengte?
De 6 cm RVS 1,5 mm in mijn RDS systeem heb ik gewoon zo gelaten. Ik kan me eigenlijk niet voorstellen dat de torsie in zo'n asje zodanig is dat het tot problemen leidt, maar misschien maak ik hierin een vergissing...
Geen idee wat de minimale stijfheid van het RDS systeem moet zijn. Ik heb voor het maximale gekozen. Dan maar ietsie zwaarder.
Overigens zie je bij de het RDS plan voor de Supergee ook een verloop van yoke-torsiebuis en servobevestiging. Dus niet alleen een Ø1.6mm staafje. Dit principe heb ik aangehouden, echter met doorlopende Ø1.6mm RVS staaf en die omwikkeld met carbon.
Nog even de RDS tekening van de Supergee ter info: http://www.charlesriverrc.org/articles/supergee/SG2/sg2_rds.pdf
[edit] correcte naamvoering is volgens mij:
pocket-whiper-torsiebuis-yoke(=servobevestiging). Dat houdt ik in het vervolg aan.
Laatst bewerkt:
Rick NL
PH-SAM
Het glas dient alleen om het carbon bij elkaar te houden tijdens het wikkelen. En idd probeer ik met het carbon de torsiestijfheid zo groot mogelijk te krijgen. Verder moet je 'vlees' hebben om een bevestiging richting de servo te kunnen maken.
De koolstof roving zal volgens mij niet veel doen. Alleen de 45° koolstof zal de torsiestijfheid geven.
Zelf gebruik ik een 3 mm RVS buisje ipv carbon waarin de 1.5 mm zilverstaal ong. 5 mm diep wordt gesoldeerd. Eerst met 0.3 mm messing draad omwikkelen als afstandhouder. Verder vrijwel identiek.
Als we dan even de puntjes op de i zetten is het wiper, zonder h.[edit] correcte naamvoering is volgens mij:
pocket-whiper-torsiebuis-yoke(=servobevestiging). Dat houdt ik in het vervolg aan.
Mooi systeem, mooie kist is het geworden.
Rick
Berrie
Vriend van modelbouwforum.nl
De koolstof roving zal volgens mij niet veel doen. Alleen de 45° koolstof zal de torsiestijfheid geven.
Klopt, rovinkjes zijn voor een extra beetje buigstijfheid + vulling om de diameter te halen vanwaar het weer makkelijk is om de yoke te maken....
Rick NL
PH-SAM
....een extra beetje buigstijfheid + vulling om de diameter te halen ....
Kan ik begrijpen.
Rick
Naar aanleiding van jouw motto hoorde ik een ook mooie variant:
"Groeien kost meer tijd dan bloeien." (Prinses Laurentien)


Berrie
Vriend van modelbouwforum.nl
Zie ik het nou goed dat je een andere pook hebt? Bij mijne gaat de vleugel over 2 pinnen heen op de romp en bij jou direct erop?
Ik heb idd een andere romp. Hierop wordt de vleugel met 4 boutjes M3 vast gezet.
Moet nog steeds een balast "iets" maken maar nog geen idee, jij nog ideeën?
Ik heb van een blok messing ballast gemaakt wat over de pylonnen past. Je kan hier wel varianten op verzinnen denk ik.


Laatst bewerkt:
Berrie
Vriend van modelbouwforum.nl
Het hebben van een buikgriep is nooit fijn, echter, de dag na de "aanvallen" is bij mij dan wel een lekker rustig rommel daagje. Die 2-2.5 kilo die je in een dag kwijt raakt er weer aan eten en drinken, een beetje zitten, vooral rustig lopen (da's het moeilijkste) en een beetje knutselen.
Zojuist de servoplank vast geharst met stukjes roving, de roerhoorntjes, het kielvlak en werppen vast gezet. Dat mag nu allemaal uitharden.
Als accu pas ik 4x 240mAh LiPo toe. Deze staan allemaal parallel, een regulator van hobbycity doet de rest.
Het is me twee keer gelukt kortsluiting te maken met het samensolderen van het pakketje. Nu plak ik alle contacten af, behalve die waaraan ik soldeer. Na een van de kortsluitingen heb ik het celletje gecyceld. Er was niets aan de hand. Kennelijk zijn die Hyperionnetjes van degelijke kwaliteit.
De ontvanger is een RX-5 M-link ontdaan van zijn behuizing. Ook de regulator heeft geen krimpkousje meer. Dit alles om een zo compact mogelijk pakketje te krijgen dat in de neus van de (idd T2) romp geschoven kan worden. De ontvanger is met isolatietape af gedekt, met glasvezeltape is dan alles aan elkaar gezet.

Om het in de romp schuiven zo makkelijk mogelijk te maken is het pakketje te knikken.

Op deze wijze kan het pakket voor de servoplank langs de neus in worden geschoven.
Eventuel lood tbv het zwaartepunt kan dan nog aan de voorzijde van het pakket worden vast gezet met glasvezel tape.
Ik weet nog niet hoe ik het pakket in de romp vast zet, maar daar is vast wel wat op te verzinnen....
Het stabilo heb ik vanwege transport demonteerbaar gehouden. Met het singlepull systeem kan je dan gerust het draadje in het rudderhorntje haken. De torsieveren trekken de draad wel strak en zorgen ervoor dat deze niet uit het rudderhorntje schiet. Hoewel het al twee jaar goed gaat op mijn Supergee zit het me niet lekker, en heb nu voor een extra borging gezorgt. Met name als je keihard gaat op grote hoogte kan het incidenteel gebeuren dat door de snelheid je hoogteroer terug gedrukt wordt, terwijl je up geeft. Dan zou het kunnen gebeuren dat het lusje uit het horntje geblazen wordt, in een vergezocht geval...
Nu kan dat niet meer. Van 0.3mm verenstaal is een haakje gemaakt, die is weer met secondenlijm en een paar haren carbon vast gezet op het hoorntje. Het lusje schuif je er zo in, althans, dat is de gedachte. Misschien is het allemaal wat ver gezocht, maar het geeft me een veilig gevoel.

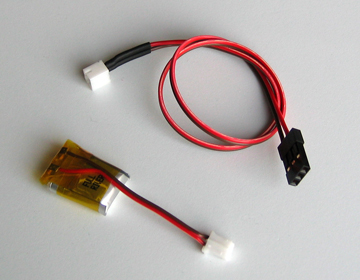
Nog een vraag aan jullie. Om mijn RAM-3 te voeden zoek ik nog een stekkertje. Op de foto zit het gezochte stekkertje aan een LiPo pakketje. Die wil ik er eigenlijk niet afknippen, om dat ik die kan gebruiken in mijn grotere zwevers. Weet iemand waar je zo'n stekkertje te pakken kan krijgen zonder dat je voor minstens E25,- moet bestellen of veel verzendkosten moet betalen?

Zojuist de servoplank vast geharst met stukjes roving, de roerhoorntjes, het kielvlak en werppen vast gezet. Dat mag nu allemaal uitharden.
Als accu pas ik 4x 240mAh LiPo toe. Deze staan allemaal parallel, een regulator van hobbycity doet de rest.
Het is me twee keer gelukt kortsluiting te maken met het samensolderen van het pakketje. Nu plak ik alle contacten af, behalve die waaraan ik soldeer. Na een van de kortsluitingen heb ik het celletje gecyceld. Er was niets aan de hand. Kennelijk zijn die Hyperionnetjes van degelijke kwaliteit.
De ontvanger is een RX-5 M-link ontdaan van zijn behuizing. Ook de regulator heeft geen krimpkousje meer. Dit alles om een zo compact mogelijk pakketje te krijgen dat in de neus van de (idd T2) romp geschoven kan worden. De ontvanger is met isolatietape af gedekt, met glasvezeltape is dan alles aan elkaar gezet.

Om het in de romp schuiven zo makkelijk mogelijk te maken is het pakketje te knikken.

Op deze wijze kan het pakket voor de servoplank langs de neus in worden geschoven.
Eventuel lood tbv het zwaartepunt kan dan nog aan de voorzijde van het pakket worden vast gezet met glasvezel tape.
Ik weet nog niet hoe ik het pakket in de romp vast zet, maar daar is vast wel wat op te verzinnen....
Het stabilo heb ik vanwege transport demonteerbaar gehouden. Met het singlepull systeem kan je dan gerust het draadje in het rudderhorntje haken. De torsieveren trekken de draad wel strak en zorgen ervoor dat deze niet uit het rudderhorntje schiet. Hoewel het al twee jaar goed gaat op mijn Supergee zit het me niet lekker, en heb nu voor een extra borging gezorgt. Met name als je keihard gaat op grote hoogte kan het incidenteel gebeuren dat door de snelheid je hoogteroer terug gedrukt wordt, terwijl je up geeft. Dan zou het kunnen gebeuren dat het lusje uit het horntje geblazen wordt, in een vergezocht geval...
Nu kan dat niet meer. Van 0.3mm verenstaal is een haakje gemaakt, die is weer met secondenlijm en een paar haren carbon vast gezet op het hoorntje. Het lusje schuif je er zo in, althans, dat is de gedachte. Misschien is het allemaal wat ver gezocht, maar het geeft me een veilig gevoel.

Nog een vraag aan jullie. Om mijn RAM-3 te voeden zoek ik nog een stekkertje. Op de foto zit het gezochte stekkertje aan een LiPo pakketje. Die wil ik er eigenlijk niet afknippen, om dat ik die kan gebruiken in mijn grotere zwevers. Weet iemand waar je zo'n stekkertje te pakken kan krijgen zonder dat je voor minstens E25,- moet bestellen of veel verzendkosten moet betalen?

Laatst bewerkt:
Berrie
Vriend van modelbouwforum.nl
Nog een vraag aan jullie. Om mijn RAM-3 te voeden zoek ik nog een stekkertje. Op de foto zit het gezochte stekkertje aan een LiPo pakketje. Die wil ik er eigenlijk niet afknippen, om dat ik die kan gebruiken in mijn grotere zwevers. Weet iemand waar je zo'n stekkertje te pakken kan krijgen zonder dat je voor minstens E25,- moet bestellen of veel verzendkosten moet betalen?
Echt niemand een idee/tip?
Berrie,
Ik geloof dat dit een soort Mini JST stekker is.. feit is alleen dat de mini JST stekkertjes meestal drie-polig zijn.. Maar is het niet veel slimmer om te normaliseren, dus deze niet standaard stekkertjes te vermijden/vervangen?
Toch misschien wat gevonden: http://www.rcmarket.org/mini-jst-connector-pr-20255.html
Ik geloof dat dit een soort Mini JST stekker is.. feit is alleen dat de mini JST stekkertjes meestal drie-polig zijn.. Maar is het niet veel slimmer om te normaliseren, dus deze niet standaard stekkertjes te vermijden/vervangen?
Toch misschien wat gevonden: http://www.rcmarket.org/mini-jst-connector-pr-20255.html
Laatst bewerkt:
Berrie
Vriend van modelbouwforum.nl
Hoi Oswaldo, bedankt voor het meedenken! Of het echt die Mini JST stekker is... ik weet het niet. Op de site van Soaring circuits is niet te lezen wat ze gebruikt hebben. Wel een iets duidelijker plaatje dan wat ik laat zien van de stekker:
Normaliseren is geen gek idee, ware het niet dat de contrastekker vast gesoldeerd zit op de printplaat.....
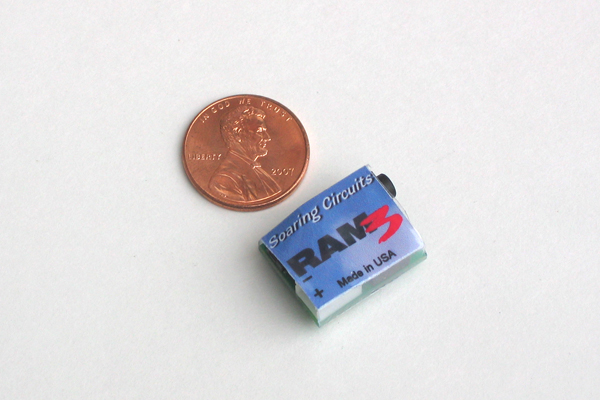
(afbeeldingen gepikt van de site van http://www.soaringcircuits.com/)
Ik denk dat ik maar eens een mailtje stuur naar Soaring Circuits.
Normaliseren is geen gek idee, ware het niet dat de contrastekker vast gesoldeerd zit op de printplaat.....
(afbeeldingen gepikt van de site van http://www.soaringcircuits.com/)
Ik denk dat ik maar eens een mailtje stuur naar Soaring Circuits.
")