TheNorb
verslagschrijvers
Omdat ik toch nog tijd overhad (... )
)
en hier nog een DG100-E45 ligt die in 2015 gebouwd moet worden
en waarin ook elektroaandrijving moet komen dacht ik:
Laat ik eens een "Intrekbare Elektroaandrijving Proof Of Concept" gaan doen.... Let wel: het gaat hier meer om de algemene werking en niet zozeer om de constructie, omdat die toch wel zal veranderen in de loop van de tijd dat ik wijzer word.
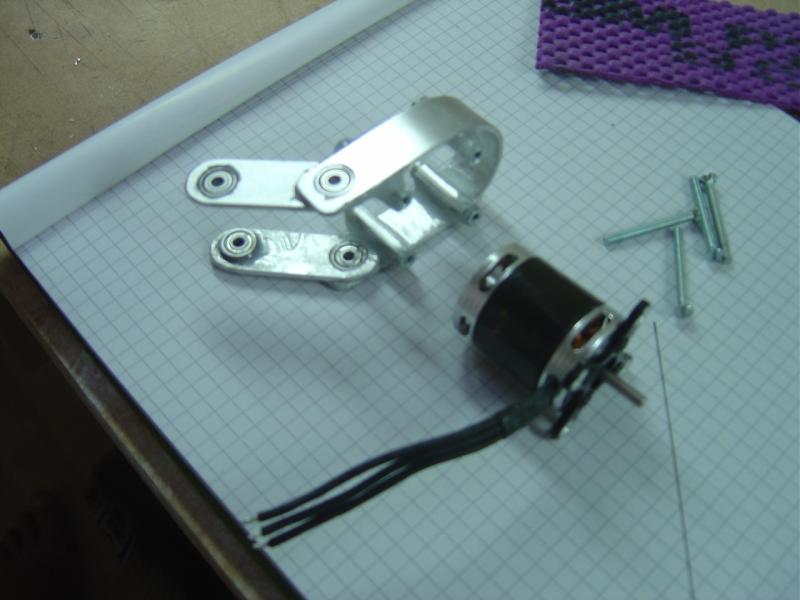
Onder het motto: "Wat Graupner kan, kan ik ook 8O" heb ik als voorbeeld zo'n Up&Go II genomen. Dat is een leuk ding, maar dan moet je wel $ meenemen. Mijn uitgangspunt is dan ook om het zo simpel mogelijk en de prijs ook zo laag mogelijk te houden. Tevens worden standaard onderdelen genomen (bijv klap-propellors)...
Het plan is om met één kanaal de hele besturing te doen. Dus als je gas geeft, dat dan de motorgondel uit de romp komt en dat dan de motor begint te draaien (softstart)....
Wens mij succes....
)en hier nog een DG100-E45 ligt die in 2015 gebouwd moet worden
en waarin ook elektroaandrijving moet komen dacht ik:
Laat ik eens een "Intrekbare Elektroaandrijving Proof Of Concept" gaan doen.... Let wel: het gaat hier meer om de algemene werking en niet zozeer om de constructie, omdat die toch wel zal veranderen in de loop van de tijd dat ik wijzer word.
Onder het motto: "Wat Graupner kan, kan ik ook 8O" heb ik als voorbeeld zo'n Up&Go II genomen. Dat is een leuk ding, maar dan moet je wel $ meenemen. Mijn uitgangspunt is dan ook om het zo simpel mogelijk en de prijs ook zo laag mogelijk te houden. Tevens worden standaard onderdelen genomen (bijv klap-propellors)...
Het plan is om met één kanaal de hele besturing te doen. Dus als je gas geeft, dat dan de motorgondel uit de romp komt en dat dan de motor begint te draaien (softstart)....
Wens mij succes....
Laatst bewerkt:






")
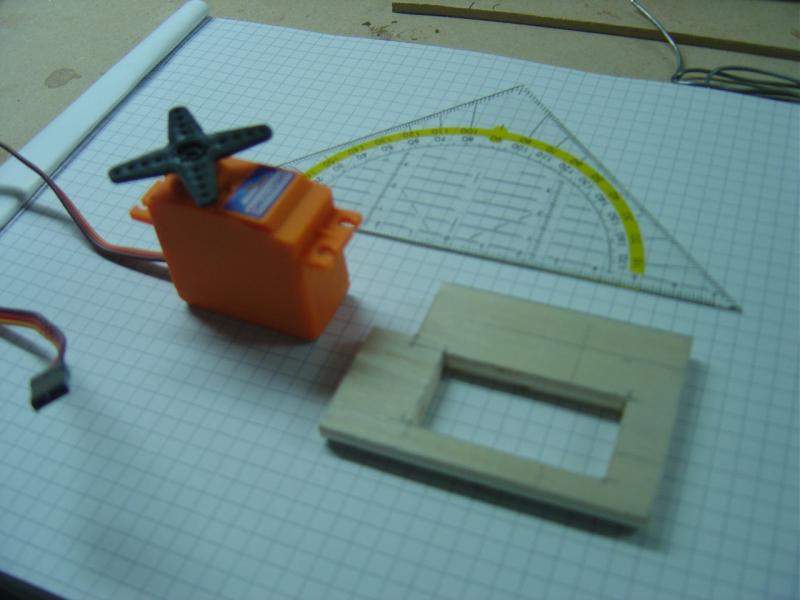
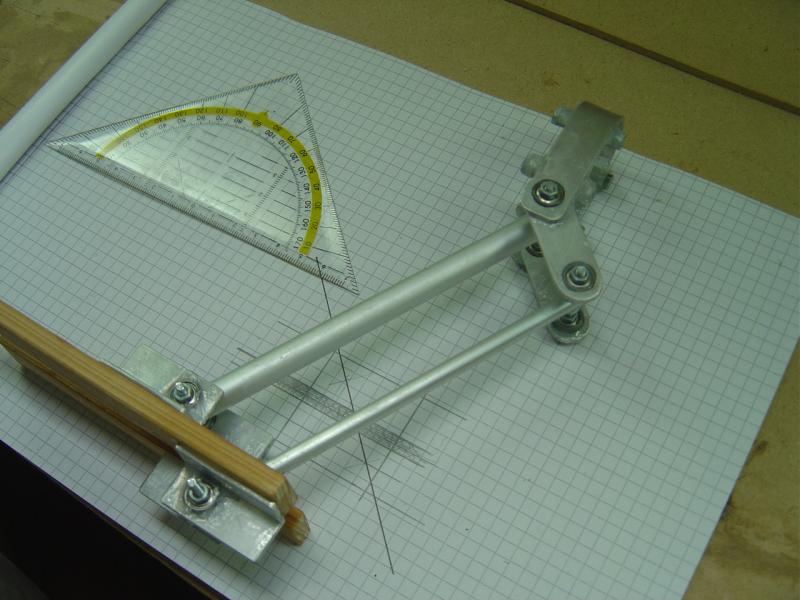
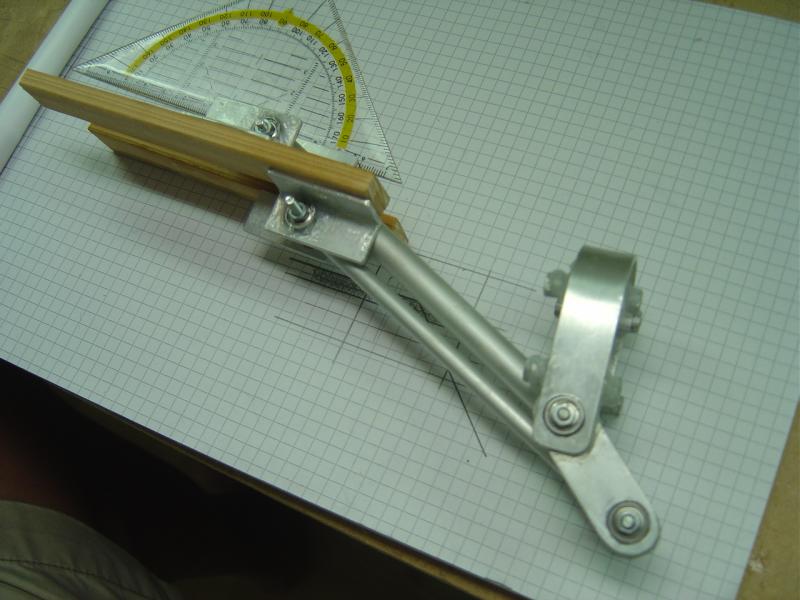
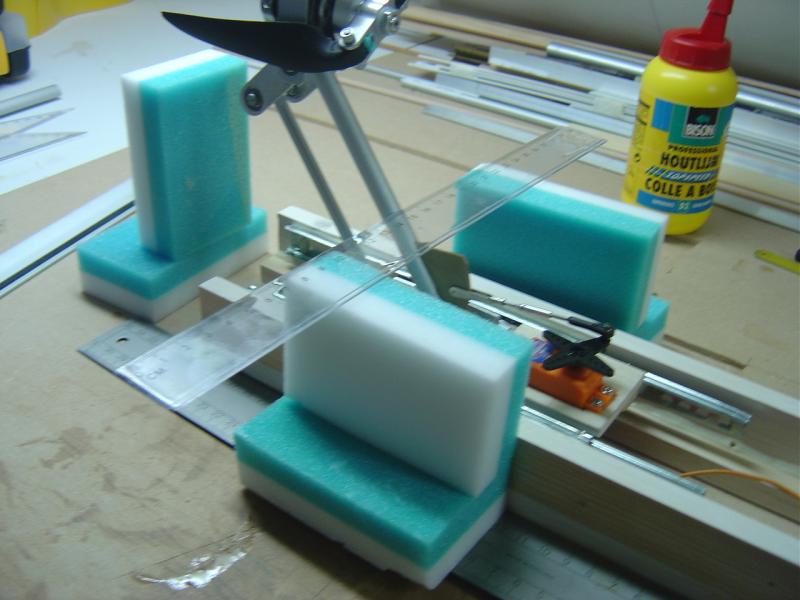
 ). Werking: als de oranje servo de gondel omhoog trekt, gaat de gondel dus een kwart-circel beweging maken. Om dit tegen te gaan (en om de gondel (bijna) loodrecht uit de romp te laten komen, moet de servoplaat dus naar voren worden getrokken, zodat de netto beweging van de gondel dus loodrecht omhoog is.....
). Werking: als de oranje servo de gondel omhoog trekt, gaat de gondel dus een kwart-circel beweging maken. Om dit tegen te gaan (en om de gondel (bijna) loodrecht uit de romp te laten komen, moet de servoplaat dus naar voren worden getrokken, zodat de netto beweging van de gondel dus loodrecht omhoog is.....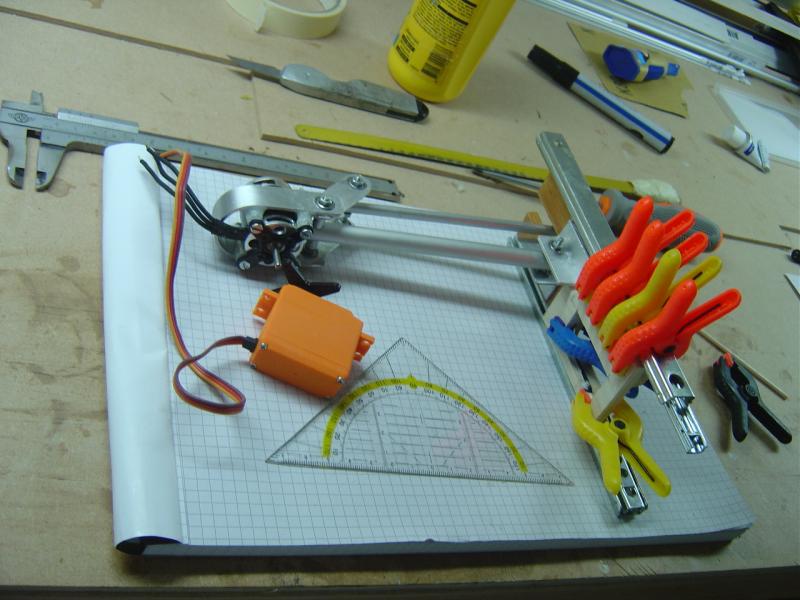











 veel suc6 dit blijf ik volgen !:wink:
veel suc6 dit blijf ik volgen !:wink:")

