Zoals de meeste wel weten werkt de nieuwe firmware van Simon kirby perfect voor een multicopter.
Ik ga deze firmware dus ook gebruiken op mijn escs voor mijn talon frame.
nu zit ik met een uitdaging misschien dat een techneut me even wat advies kan geven want ik kan het nergens vinden.
De esc open met de benamingen erbij


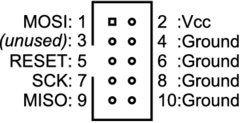
Nu heeft de usb avr programer de volgende aansluitingen:
MOSI
MISO
SCK
NC
RST
dat zijn er 5 ipv 6
Als ik het goed begrijp is dan de MOSI ook de +? (5v)
en de NC de - (GND) ??
Wie helpt mij uit de brand
Ik ga deze firmware dus ook gebruiken op mijn escs voor mijn talon frame.
nu zit ik met een uitdaging misschien dat een techneut me even wat advies kan geven want ik kan het nergens vinden.
De esc open met de benamingen erbij
Nu heeft de usb avr programer de volgende aansluitingen:
MOSI
MISO
SCK
NC
RST
dat zijn er 5 ipv 6
Als ik het goed begrijp is dan de MOSI ook de +? (5v)
en de NC de - (GND) ??
Wie helpt mij uit de brand
.jpg)