A.T.V.
Een aantal jaar geleden ben ik begonnen met "Cruise-control voor een E-zwever". Wat ik wil is een e-zwever die je normaal bestuurt, behalve als je de sticks loslaat. Dan schakelt de autopilot is en houd het toestel in de buurt en gaat zelf op zoek naar thermiek, of start de motor als het toestel te laag komt. Om ergens naar toe te werken heb ik als doel om 100m hoogtewinst zonder ingrijpen te halen.
Er zijn nu verschillende forum-leden bezig met een autopilot. Het is voor geintresseerden misschien wel leuk om er wat meer over te horen. Nu het me een paar keer gelukt is automatisch te klimmen in thermiek, lijkt me het een goed moment om wat meer te laten zien en te vertellen.
Waarom een ATV?
- Groter zoekgebied
- Meer controle wanneer verder weg
- Langer boven, meer zoeken
- Minder inspanning/concentratie
- Meer om je heen kunnen kijken op zoek naar thermiek (b.v. vogels)
- Veiligheid (uitval zender/ontvanger)
- Efficiëntere bochten mogelijk
- Efficiënter gebruik maken van de motor
- Meer mogelijkheden voor trimmen, mixen, snelheid, motor vermogen
- Documenteren vlucht, leerzaam
Wat dit project anders maakt?
- geen waypoints, maar binnen een heel gebied blijven
- relatief eenvoudige code, geen Trigonometrie toegepast
- kleine microprocessor (sensoren hebben wel eigen processors)
- alle beslissingen worden aan boord genomen (geen computer op de grond)
- voor een groot deel gratis software gebruikt
Het toestel moet zelfstandig naar thermiek zoeken in een gebied van 200 * 200 m. Het model blijft op 100 tot 300 m hoogte, eventueel gebruikmakend van de motor. De bestuurder kan zelf sturen, het toestel gaat echter zelf sturen als je de besturing loslaat. Bij problemen, zoals het uitvallen van de zender, zal het toestel automatisch in het midden van het opgegeven gebied een landing uitvoeren.
Een camera aan boord maakt beelden vanuit de cockpit, die na de vlucht bekeken kunnen worden. Op de grond is een ontvanger die gegevens weergeeft over route, hoogte, accuspanning e.d. De gegevens worden ook bewaard voor latere verwerking.
Ik ben natuurlijk niet de enige die zoiets heeft gebouwd. Hier wat andere projecten:
- Nasa Autonomous Soaring Project UAV Cloud Swift (
http://www.technovelgy.com/ct/Science-Fiction-News.asp?NewsNum=471)
- Dan Edwards - Aloft (http://soaring.goosetechnologies.com/)
- Staffan Kjerrström (http://hem.passagen.se/skj/engelska/NEWS2005.HTM)
- Andrea Salvatore http://diydrones.com/profiles/blogs/705844:BlogPost:31255
Mijn project heb ik ATV gedoopt, wat staat voor Autonoom Thermiekend Vliegtuig (en omdat ik de ESA-variant zo'n mooi stuk techniek vindt).
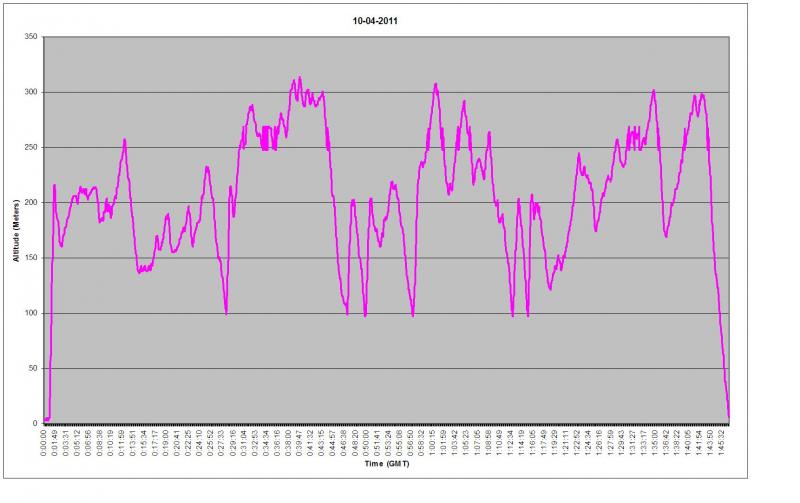
Deze vlucht heb ik vandaag gemaakt. Volgens mij heb ik mijn doel van 100m hoogtewinst ruim gehaald!


") ). Ik heb nog even niet kunnen ontdekken wat ik fout heb ingesteld.
). Ik heb nog even niet kunnen ontdekken wat ik fout heb ingesteld. atrol.jpg - Gluonpilot
atrol.jpg - Gluonpilot