TheNorb
verslagschrijvers
Stapje verder
Zo weer even aan het prutsen geweest, filmpje is [URL="
[/URL] te zien. Dit prutsen kan zo niet langer doorgaan, want het plakband raakt op... :-| Vandaag had ik nog even een helder ogenblik en heb (om de uitslag groter te krijgen) gewoon het gaatje (van de stuurstang waar de servo aan zit), 1mm dichter bij de as geboord...  ja, zo kan het ook....
ja, zo kan het ook....
Op onderstaande foto is nog de saté prikker met aangelijmde M3 bout te zien. Deze radiusstang heb ik even voor het demo-effect aan de tafel geplakt.... De rompopening kan nog een stuk kleiner.
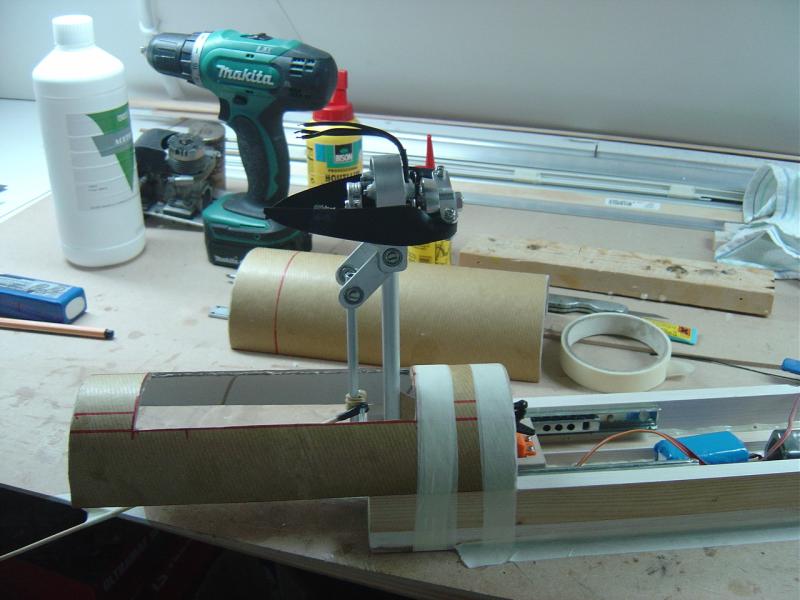
Nu wordt het tijd om deze radiusstang netjes te maken, want hij loopt ook nog aan, aan de onderkant van de gondel....

Zo weer even aan het prutsen geweest, filmpje is [URL="
ja, zo kan het ook....Op onderstaande foto is nog de saté prikker met aangelijmde M3 bout te zien. Deze radiusstang heb ik even voor het demo-effect aan de tafel geplakt.... De rompopening kan nog een stuk kleiner.
Nu wordt het tijd om deze radiusstang netjes te maken, want hij loopt ook nog aan, aan de onderkant van de gondel....
Laatst bewerkt door een moderator:

") idee, maar het is nog even wachten op de onderdelen van mijn HK-vrienden.
idee, maar het is nog even wachten op de onderdelen van mijn HK-vrienden.
 , maar de constructie is op dat punt nog niet klaar. Er komt nog een soort van aanloop (lees halve buis, waar de hoofdstang straks tegenaan loopt. Tevens wordt deze uitgerust met een "eindschakelaar".
, maar de constructie is op dat punt nog niet klaar. Er komt nog een soort van aanloop (lees halve buis, waar de hoofdstang straks tegenaan loopt. Tevens wordt deze uitgerust met een "eindschakelaar". ... Misschien iets voor de volgende versie, het blijft een POC om inzicht te krijgen, en dat krijg ik en jullie erbij hoop ik!
... Misschien iets voor de volgende versie, het blijft een POC om inzicht te krijgen, en dat krijg ik en jullie erbij hoop ik!
 roost:
roost:
 Hiervoor gebruik ik een
Hiervoor gebruik ik een 