Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Nota: This feature may not be available in some browsers.
Je gebruikt een verouderde webbrowser. Het kan mogelijk deze of andere websites niet correct weergeven.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
Het is raadzaam om je webbrowser te upgraden of een alternatieve webbrowser te gebruiken.
TU Delft Zeilboot, uitslag; 2e plaats!
- Topicstarter Kars.R
- Startdatum
 samen met een 3 axis graviteit sensor is daar wel een goede langs en dwars stabilisatie mee te maken zonder veel geld uit te geven
samen met een 3 axis graviteit sensor is daar wel een goede langs en dwars stabilisatie mee te maken zonder veel geld uit te geven 
ligt eraan of die microcontroller zichzelf regelt en niet een extra (bijv gyro sensitivity) kanaal nodig heeft van de zender (zoals in het geval van een heli)
Ik zal me vanavond nog eens toespitsen op jouw boten, heb al een keer je site bekeken, ze varen volledig autonoom, dus ook die met die 3 axis graviteit sensor?
ik zou zeker wel meer info willen :wink:
Ik zal me vanavond nog eens toespitsen op jouw boten, heb al een keer je site bekeken, ze varen volledig autonoom, dus ook die met die 3 axis graviteit sensor?
ik zou zeker wel meer info willen :wink:
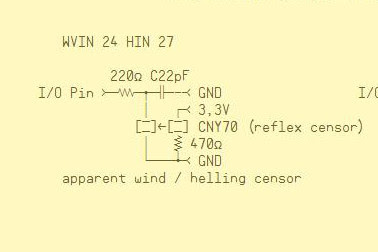
Bij mijn boot zit er een hellings sensor in,( zelfde principe als windvaan en giek sensor) eigen ontwerp met een stukje pvc buis - condensator - en refleks sensor die als regelbare weerstand werkt door een wit vlak waarvan de afstand wijzigd . Een graviteit sensor is lichter en werkt in 2 of 3 assen in mijn blog volledige uitleg met foto,s ")
http://4.bp.blogspot.com/_-PWCqx5cf1A/S9bw0fOWieI/AAAAAAAAAcY/V5mMSc5skUc/s400/RC+NETWERK+SCHEMA.jpg
http://4.bp.blogspot.com/_-PWCqx5cf1A/S9bw0fOWieI/AAAAAAAAAcY/V5mMSc5skUc/s400/RC+NETWERK+SCHEMA.jpg
Hallo
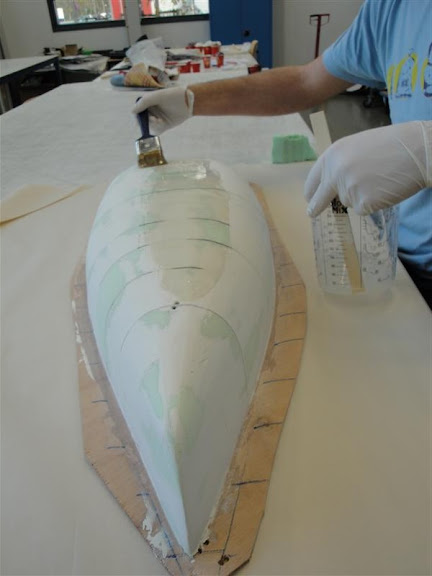
vandaag de albestine mooi glad gestreken, maar alsnog zaten we te twijfelen over de sterkte van de mal, zeker als hij meer als 1 keer mee mocht gaan, daarom zijn we naar het composietenlab van onze buren InHolland gelopen, en deze beste mensen hadden wat epoxy gemengd en daar hebben we onze romp mee versterkt, Hij is nu sowieso sterk genoeg voor de vacuumvorm machine, werd ons verzekerd, daarnaast zouden we er ook nu glasmatjes over kunnen leggen om er een mal van te maken,
we zien het morgenochtend, als de epoxy is gedroogd en we de boel gaan vacuumvormen,
zeer waarschijnlijk gaan we alleen de voorste foil draaibaar maken aan de hand van een voeler, voor het rol/zeilmoment verwachten we met voldoende gewicht op dek geen trimmende vlakken met voelers op de achterste foil te zetten, wat ons zeer veel tijd bespaard
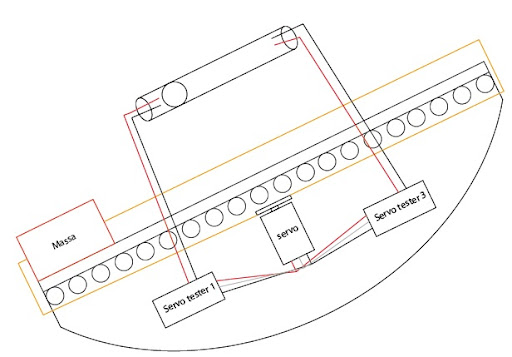
over het verplaatsen van het gewicht op dek hebben we een regelsysteem bedacht, welke ik hieronder heb verbeeld, zeer waarschijnlijk zal de winch servo zoals ik hem nu heb afgebeeld niet snel genoeg zijn om het gewicht (rond de 300g) te verplaatsen, dus hier zijn we nog een overbrenging voor aan het bedenken, maar het idee is duidelijk, wat vinden jullie hiervan?
hieronder de foto's van het epoxy-en;



En als laatste vraag, wat vinden jullie van de accu capaciteit van 800mah? zoiets weegt als LiPo 2s 50g, maar houdt dit het een uurtje vol, met 4 servo's+1 ontvanger+BEC?
mvg Kars+crew!
vandaag de albestine mooi glad gestreken, maar alsnog zaten we te twijfelen over de sterkte van de mal, zeker als hij meer als 1 keer mee mocht gaan, daarom zijn we naar het composietenlab van onze buren InHolland gelopen, en deze beste mensen hadden wat epoxy gemengd en daar hebben we onze romp mee versterkt, Hij is nu sowieso sterk genoeg voor de vacuumvorm machine, werd ons verzekerd, daarnaast zouden we er ook nu glasmatjes over kunnen leggen om er een mal van te maken,
we zien het morgenochtend, als de epoxy is gedroogd en we de boel gaan vacuumvormen,
zeer waarschijnlijk gaan we alleen de voorste foil draaibaar maken aan de hand van een voeler, voor het rol/zeilmoment verwachten we met voldoende gewicht op dek geen trimmende vlakken met voelers op de achterste foil te zetten, wat ons zeer veel tijd bespaard
over het verplaatsen van het gewicht op dek hebben we een regelsysteem bedacht, welke ik hieronder heb verbeeld, zeer waarschijnlijk zal de winch servo zoals ik hem nu heb afgebeeld niet snel genoeg zijn om het gewicht (rond de 300g) te verplaatsen, dus hier zijn we nog een overbrenging voor aan het bedenken, maar het idee is duidelijk, wat vinden jullie hiervan?
hieronder de foto's van het epoxy-en;
En als laatste vraag, wat vinden jullie van de accu capaciteit van 800mah? zoiets weegt als LiPo 2s 50g, maar houdt dit het een uurtje vol, met 4 servo's+1 ontvanger+BEC?
mvg Kars+crew!
Gaat er goed uitzien jongens! Ik had eerlijk gezegd niet verwacht dat het er zo mooi glad uit zou komen te zien 
Alleen de voorste vleugel trimbaar voor de vaarhoogte is het goede systeem, zo doen de echte het ook.
Het gewicht; een zeilwinch is sowieso te traag hiervoor. Bovendien zijn al die lijnen kwetsbaar. Beter zou een zeilservo kunnen. Die hebben veel kracht en een hele grote arm die je met een hevelsysteem het gewicht kunt laten verschuiven. Ze zijn ook nog eens goedkoper dan een winch. Een groot krachtig servo zoals die in bigscale auto's gebruikt worden is ook een optie. Hoe die aansturing met twee servotesters en dat 'balletje in de buis' systeem zou moeten werken is mij even onduidelijk.
Afhankelijk van hoe goed het trimsysteem op de vleugel werkt zou je misschien ook gewoon het gewicht vast op de servoarm kunnen monteren. Dan beschrijft het wel een kwart cirkel boven het dek, maar dat zou op te vangen moeten zijn. Ligt eraan hoe de boot straks op gewichtsverschuivingen en het trimmen van de vleugels reageert. Of het gewicht dan midscheeps meer voor of achter moet liggen is even uittesten.
De accu; daar is nu nog weinig over te zeggen. Normaal gesproken is voor een 'normale' zeilboot 800 mAh voldoende, maar wat jullie boot aan stroom gaat trekken is nog maar de vraag. Het roerservo en de ontvangen is het probleem niet, wel de servo die het gewicht moet gaan bewegen. Die zou wel eens meer stroom kunnen gaan trekken dan je denkt omdat die het gewicht straks bijna continu zal moeten gaan bewegen. Mijn schatting zou zijn om op 1500 of 2000 mAh te gaan zitten.
Een 2S lipo moet je mee oppassen. Als je een ontvanger hebt met BEC, die dus zelf de spanning naar 5 volt terugregelt, kan dat wel alleen ben ik bang dat die ingebouwde BEC het grote 'gewichtservo' niet aankan. Die kan zomaar 2 amp piekbelasting geven. Heb je een ontvanger zonder BEC dan is de 8,4 volt die een volle 2S lipo er uitgooit teveel voor de ontvanger zelf en de servo's er achter. Persoonlijk zou ik voor een traditionele NiHm accu met 4 cellen gaan. In 2000 mAh weegt die wel iets meer als een vergelijkbare lipo, maar het hele spul moet wel bedrijfszeker zijn.
Ander idee qua gewicht, je kunt ook de accu als verschuif-/ verdraaibaar gewicht gaan gebruiken ..... scheelt je aardig aan verder gewicht in de boot. En dan moet je juist een zware hebben")
Alleen de voorste vleugel trimbaar voor de vaarhoogte is het goede systeem, zo doen de echte het ook.
Het gewicht; een zeilwinch is sowieso te traag hiervoor. Bovendien zijn al die lijnen kwetsbaar. Beter zou een zeilservo kunnen. Die hebben veel kracht en een hele grote arm die je met een hevelsysteem het gewicht kunt laten verschuiven. Ze zijn ook nog eens goedkoper dan een winch. Een groot krachtig servo zoals die in bigscale auto's gebruikt worden is ook een optie. Hoe die aansturing met twee servotesters en dat 'balletje in de buis' systeem zou moeten werken is mij even onduidelijk.
Afhankelijk van hoe goed het trimsysteem op de vleugel werkt zou je misschien ook gewoon het gewicht vast op de servoarm kunnen monteren. Dan beschrijft het wel een kwart cirkel boven het dek, maar dat zou op te vangen moeten zijn. Ligt eraan hoe de boot straks op gewichtsverschuivingen en het trimmen van de vleugels reageert. Of het gewicht dan midscheeps meer voor of achter moet liggen is even uittesten.
De accu; daar is nu nog weinig over te zeggen. Normaal gesproken is voor een 'normale' zeilboot 800 mAh voldoende, maar wat jullie boot aan stroom gaat trekken is nog maar de vraag. Het roerservo en de ontvangen is het probleem niet, wel de servo die het gewicht moet gaan bewegen. Die zou wel eens meer stroom kunnen gaan trekken dan je denkt omdat die het gewicht straks bijna continu zal moeten gaan bewegen. Mijn schatting zou zijn om op 1500 of 2000 mAh te gaan zitten.
Een 2S lipo moet je mee oppassen. Als je een ontvanger hebt met BEC, die dus zelf de spanning naar 5 volt terugregelt, kan dat wel alleen ben ik bang dat die ingebouwde BEC het grote 'gewichtservo' niet aankan. Die kan zomaar 2 amp piekbelasting geven. Heb je een ontvanger zonder BEC dan is de 8,4 volt die een volle 2S lipo er uitgooit teveel voor de ontvanger zelf en de servo's er achter. Persoonlijk zou ik voor een traditionele NiHm accu met 4 cellen gaan. In 2000 mAh weegt die wel iets meer als een vergelijkbare lipo, maar het hele spul moet wel bedrijfszeker zijn.
Ander idee qua gewicht, je kunt ook de accu als verschuif-/ verdraaibaar gewicht gaan gebruiken ..... scheelt je aardig aan verder gewicht in de boot. En dan moet je juist een zware hebben
Laatst bewerkt:
pompebled
Forum veteraan
Met betrekking tot een verplaatsbaar gewicht zijn er van Aquataur een aantal modellen op de markt (geweest):
Aquataur A600 Sailboat
De Aquataur site zelf krijg ik geen toegang meer toe, jammer genoeg.
Groeten, Jan.
Aquataur A600 Sailboat
De Aquataur site zelf krijg ik geen toegang meer toe, jammer genoeg.
Groeten, Jan.
D
dirkvl
Guest
Kleine uitleg over het genoemde balanssysteem:
Aan de servo worden 2 servotesters gekoppeld. 1 voor maximale uitslag links, 1 voor max rechts. De stroomvoorziening zou dan worden gekoppeld aan de zeer analoge lagerregelaar/gravitatiesensor/balletje-in-een-buis-ofzo, zodat de boot onder helling zelf het gewicht verplaats totdat hij in zijn maximale uitslag zit, of recht licht, waarna de power van de testers af gaat. dit elaborate systeem is een combinatie van het niet kunnen gebruiken van een gyro en eisen van docenten....
qua gewicht was het inderdaad al het plan om de ontvanger, bec, accu en stabilisatieservo als contragewicht aan elkaar de koppelen en allemaal te verschuiven. de zoektoch is alleen naar een servo die heel snappy is en +-400gram ballast snel kan verplaatsen. zeilwinch is ook zeker een optie, maar hoe snel zijn die? ik heb daar geen duidelijke videos van kunnen vinden.
Aan de servo worden 2 servotesters gekoppeld. 1 voor maximale uitslag links, 1 voor max rechts. De stroomvoorziening zou dan worden gekoppeld aan de zeer analoge lagerregelaar/gravitatiesensor/balletje-in-een-buis-ofzo, zodat de boot onder helling zelf het gewicht verplaats totdat hij in zijn maximale uitslag zit, of recht licht, waarna de power van de testers af gaat. dit elaborate systeem is een combinatie van het niet kunnen gebruiken van een gyro en eisen van docenten....
qua gewicht was het inderdaad al het plan om de ontvanger, bec, accu en stabilisatieservo als contragewicht aan elkaar de koppelen en allemaal te verschuiven. de zoektoch is alleen naar een servo die heel snappy is en +-400gram ballast snel kan verplaatsen. zeilwinch is ook zeker een optie, maar hoe snel zijn die? ik heb daar geen duidelijke videos van kunnen vinden.
D
dirkvl
Guest
ah, die aquataur is er 1 om te onthouden! ziet er voor een bovendeks systeem nog vrij elegant uit
Hallo Dirk,
Na jou uitleg is het me wat duidelijker. Maar helaas gaat dat zo niet werken. Even wat uitleg over servo's:
Ze zijn met drie draden aan de ontvanger verbonden, plus, min en de puls draad. Op die laatste staat het signaal waarmee de servo weet naar welke stand hij moet gaan. Dit is echter geen analoog verlopende spanning maar een 50 Hz blokgolf. De breedte van de blokken bepalen hoe de servo gaat staan. Dat varieert van 0,5 tot 1,5 milliseconde (kan ook 1,0 tot 2,0 ms zijn, maar het gaat even om het idee)
Een servotester kun je instellen op een bepaalde stand. Echter het signaal uit twee testers 'mixen' om tot een gemiddelde waarde te komen, al dan niet beinvloed door jullie "zeer analoge lagerregelaar/gravitatiesensor/balletje-in-een-buis-ofzo" gaat niet lukken. Met twee voltages gaat dat wel, met twee puls signalen niet, dan raakt de servo hopeloos de tel kwijt. Of je moet iets elektronisch bedenken dat de twee ingestelde pulsbreedtes als maximalen neemt, en afhankelijk van het scheefhangen daar een bepaalde gemiddelde waarde van maakt. En dan ben je feitelijk een lageregler aan het bouwen .. En ook een soort gyro, de gyro's en lagereglers die wij gebruiken worden tussen de ontvanger en de servo in gezet en beinvloeden de pulsbreedte afhankelijk van de afwijking die ze constateren.
En ook een soort gyro, de gyro's en lagereglers die wij gebruiken worden tussen de ontvanger en de servo in gezet en beinvloeden de pulsbreedte afhankelijk van de afwijking die ze constateren.
Maar wat zijn dan eigenlijk die eisen van je docent, en waarom mag een gyro/lageregler niet gebruikt worden? Dit voordat we allerlei oplossingen bedenken die niet in het kader passen
Na jou uitleg is het me wat duidelijker. Maar helaas gaat dat zo niet werken. Even wat uitleg over servo's:
Ze zijn met drie draden aan de ontvanger verbonden, plus, min en de puls draad. Op die laatste staat het signaal waarmee de servo weet naar welke stand hij moet gaan. Dit is echter geen analoog verlopende spanning maar een 50 Hz blokgolf. De breedte van de blokken bepalen hoe de servo gaat staan. Dat varieert van 0,5 tot 1,5 milliseconde (kan ook 1,0 tot 2,0 ms zijn, maar het gaat even om het idee)
Een servotester kun je instellen op een bepaalde stand. Echter het signaal uit twee testers 'mixen' om tot een gemiddelde waarde te komen, al dan niet beinvloed door jullie "zeer analoge lagerregelaar/gravitatiesensor/balletje-in-een-buis-ofzo" gaat niet lukken. Met twee voltages gaat dat wel, met twee puls signalen niet, dan raakt de servo hopeloos de tel kwijt. Of je moet iets elektronisch bedenken dat de twee ingestelde pulsbreedtes als maximalen neemt, en afhankelijk van het scheefhangen daar een bepaalde gemiddelde waarde van maakt. En dan ben je feitelijk een lageregler aan het bouwen ..
En ook een soort gyro, de gyro's en lagereglers die wij gebruiken worden tussen de ontvanger en de servo in gezet en beinvloeden de pulsbreedte afhankelijk van de afwijking die ze constateren.Maar wat zijn dan eigenlijk die eisen van je docent, en waarom mag een gyro/lageregler niet gebruikt worden? Dit voordat we allerlei oplossingen bedenken die niet in het kader passen
D
dirkvl
Guest
@lex
het idee is niet om de twee testers te mixen, maar om maar 1 van de 2 aan te zetten, afhankelijk van de helling.
de eisen zijn dat de boot met 4 servo's bestuurt dient te worden en dingen als gyro's zijn soort-van verboden omdat het geen elektronica oorlog moet worden, vandaar de wat mechanischere oplossing.
het idee is niet om de twee testers te mixen, maar om maar 1 van de 2 aan te zetten, afhankelijk van de helling.
de eisen zijn dat de boot met 4 servo's bestuurt dient te worden en dingen als gyro's zijn soort-van verboden omdat het geen elektronica oorlog moet worden, vandaar de wat mechanischere oplossing.
het 'balletje' in de buis raakt de 2 contactjes aan waarna de servotester pas zijn spanning krijgt en de servo op de vooraf ingestelde positie zet, op het moment dat de boot daarna onder minder helling komt te staan, verdwijnt deze spanning en blijft de servo staan, als de boot daarna de andere kant op helt rolt het balletje tegen de andere contactjes, waardoor de stroomkring van die servo tester sluit en de servo op die vooraf ingestelde waarde instelt,
Het is dus niet zo dat de 2 'servotesters' tegelijk pulsen afgeeft,
over de eisen, een gyro is simpelweg niet mogelijk omdat de ontvanger en zender niet geschikt zijn, (zeer standaard ntb 4kanaals zender)
een lagerregler is te duur, een zelfgebouwde versie zou dus ideaal zijn :wink: dus als iemand daar nog meer ideeen over heeft?
mvg Kars
Het is dus niet zo dat de 2 'servotesters' tegelijk pulsen afgeeft,
over de eisen, een gyro is simpelweg niet mogelijk omdat de ontvanger en zender niet geschikt zijn, (zeer standaard ntb 4kanaals zender)
een lagerregler is te duur, een zelfgebouwde versie zou dus ideaal zijn :wink: dus als iemand daar nog meer ideeen over heeft?
mvg Kars
OK. Maar dan heb je dus alleen steeds de volle uitslag. Ook dat gaat niet werken omdat de winddruk niet constant is en dat uiterste punt steeds óf te veel óf te weinig is. Met dat balletje als welles-nietes contact compenseer je dat veel te grof. Dan hou je de vleugels nooit horizontaal. Je zult één of andere variabele manier van bedienen van dat gewicht moeten verzinnen zodat je net zoveel tegenkracht opwekt als de winddruk. Anders zie ik de boot nooit bestuurbaar op de vleugels gaan varen.
Eerlijk gezegd lijkt me dan de methode van twee stuurlieden, één voor roer en schoot, en de andere puur voor het tegengewicht, een betere optie dan dit 'alles of niets' contragewicht.
Een lageregler is zelf te bouwen, daar zijn schema's voor. Ik heb dat zelf ook geprobeert, het resultaat werkte wel, maar erg onnauwkeurig en onbetrouwbaar. Als je wilt kan ik dat wel inscannen en mailen. Het is alleen in het Duits, aber das darf für Euch kein Problem sein, oder?
Elke zender-ontvanger combinatie kan met een gyro en/of lageregler overweg. Het is alleen een stukje elektronica dat tussen de ontvanger en de servo wordt gezet en het signaal bijregelt naar de mate van scheefhangen. Het 'werkt' met het puls signaal naar de servo's toe, en dat is universeel voor elke modelbouw RC besturing.
Eerlijk gezegd lijkt me dan de methode van twee stuurlieden, één voor roer en schoot, en de andere puur voor het tegengewicht, een betere optie dan dit 'alles of niets' contragewicht.
Een lageregler is zelf te bouwen, daar zijn schema's voor. Ik heb dat zelf ook geprobeert, het resultaat werkte wel, maar erg onnauwkeurig en onbetrouwbaar. Als je wilt kan ik dat wel inscannen en mailen. Het is alleen in het Duits, aber das darf für Euch kein Problem sein, oder?
Elke zender-ontvanger combinatie kan met een gyro en/of lageregler overweg. Het is alleen een stukje elektronica dat tussen de ontvanger en de servo wordt gezet en het signaal bijregelt naar de mate van scheefhangen. Het 'werkt' met het puls signaal naar de servo's toe, en dat is universeel voor elke modelbouw RC besturing.
we twijfelen nog steeds, eerst maar een uitgebreide berekeningen mbt de weerstand en lift van de hydrofoils, tezamen met de berekeningen van de stabiliteit, daarnaast hebben we vrijwel 0 oprichtend moment mochten we wel omslaan, hier zouden we nog een oplossing voor willen hebben, een noodoplossing!
hier de vorderingen van vandaag

De vacuumvormer

Past dus maar net, deze bank meet 80x80cm, groter dat 85cm ging de romp dan ook niet worden, allemaal erg spannend of hij bij de boeg en spiegel ging scheuren/vouwen, zoiets weet je nooit en verandert bij elke vacuumvorm sessie

Verwarmen van de 2mm PETg plaat, belangrijk dat hij in de hoekjes net zo warm wordt, zeker vanwege die gigantische boeg die precies in het hoekje zit

Net uit het apparaat

Hier waren we heel blij, de boeg heeft niet door de plaat heen gesneden, en tot redelijk ver meegetrokken
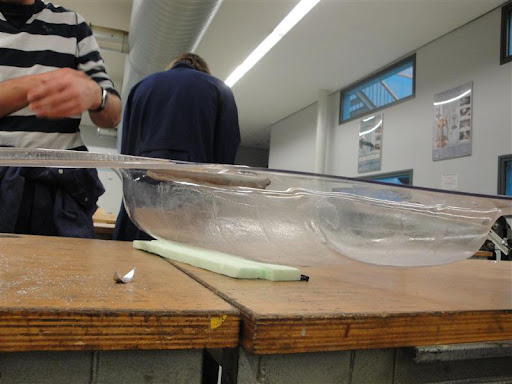
vrij strak allemaal

met de hoogtemicrometer de zijkanten af tekenen en daarna langs de lintzaag halen, zoals te zien nog vrij veel te schuren, maar daar ligt ook het probleem

vrij veel vrijboord weggehaald omdat de boot super ondiep komt te liggen en even in de sleeptank gekeken en hellingshoek van 70g is nog wel haalbaar,
maar nu, de romp moet net als de boot natuurlijk super licht zijn, meer dan we hadden voorzien, we gaan kijken hoeveel hier nog vanaf te halen is, we gokken tot rond de 350g, wat vinden jullie?, eventueel kunnen we hem nog een keer vacuumvormen met een 1mm plaat, past eigenlijk niet in ons budget en de kans van doorscheuren is natuurlijk nog veel groter, we houden jullie op de hoogte,
owja, en voor wie zich afvroeg waarom er geen foto's gemaakt zijn van tijdens het vacuumvormen, toen was ik aan het filmen;
grt Kars
hier de vorderingen van vandaag
De vacuumvormer
Past dus maar net, deze bank meet 80x80cm, groter dat 85cm ging de romp dan ook niet worden
, allemaal erg spannend of hij bij de boeg en spiegel ging scheuren/vouwen, zoiets weet je nooit en verandert bij elke vacuumvorm sessie
Verwarmen van de 2mm PETg plaat, belangrijk dat hij in de hoekjes net zo warm wordt, zeker vanwege die gigantische boeg die precies in het hoekje zit
Net uit het apparaat
Hier waren we heel blij, de boeg heeft niet door de plaat heen gesneden, en tot redelijk ver meegetrokken
vrij strak allemaal
met de hoogtemicrometer de zijkanten af tekenen en daarna langs de lintzaag halen, zoals te zien nog vrij veel te schuren, maar daar ligt ook het probleem
vrij veel vrijboord weggehaald omdat de boot super ondiep komt te liggen en even in de sleeptank gekeken en hellingshoek van 70g is nog wel haalbaar,
maar nu, de romp moet net als de boot natuurlijk super licht zijn, meer dan we hadden voorzien, we gaan kijken hoeveel hier nog vanaf te halen is, we gokken tot rond de 350g, wat vinden jullie?, eventueel kunnen we hem nog een keer vacuumvormen met een 1mm plaat, past eigenlijk niet in ons budget en de kans van doorscheuren is natuurlijk nog veel groter, we houden jullie op de hoogte,
owja, en voor wie zich afvroeg waarom er geen foto's gemaakt zijn van tijdens het vacuumvormen, toen was ik aan het filmen;
grt Kars
Laatst bewerkt door een moderator:
D
dirkvl
Guest
Zijn er mensen die ervaring hebben met planerende modellen? Dit werkt natuurlijk totaal anders dan op ware grootte.
Laatst bewerkt door een moderator:
pompebled
Forum veteraan
Hallo Dirk,
Het grootste verschil is het feit dat het water niet op schaal is; de boot wordt veel harder afgeremd dan een 1:1 schip, vanwege het enorme verschil in massa.
Een planerende romp zal prima werken; er zijn verschillende modelzeilboten die op ruimwindse koersen in plané komen, dat gaat hard.
Jullie moeten nu beslissen of de boot een kielvin krijgt, met een verplaatsbaar gewicht zoals de Aquataur, of een kiel met ballastbulb, waarmee het een 'gewone' zeilboot wordt.
De laatste is wel het gemakkelijkst te bedienen, omdat je het bewegen van het ballastgewicht niet d.m.v. elektronika (gyro / Lagereglermag aansturen...
Groeten, Jan.
Het grootste verschil is het feit dat het water niet op schaal is; de boot wordt veel harder afgeremd dan een 1:1 schip, vanwege het enorme verschil in massa.
Een planerende romp zal prima werken; er zijn verschillende modelzeilboten die op ruimwindse koersen in plané komen, dat gaat hard.
Jullie moeten nu beslissen of de boot een kielvin krijgt, met een verplaatsbaar gewicht zoals de Aquataur, of een kiel met ballastbulb, waarmee het een 'gewone' zeilboot wordt.
De laatste is wel het gemakkelijkst te bedienen, omdat je het bewegen van het ballastgewicht niet d.m.v. elektronika (gyro / Lagereglermag aansturen...
Groeten, Jan.
de spec's van de servo's zijn doorgekomen en die zijn als volgt:
- een 4-kanaals 2.4 GHz zenderset van Jamara, inclusief aan/uit-schakelaar
- een Hitec HS-785HB zeilwinch (HS-785HB - Hitec RCD)
- voor de overige drie servo's een vrije keuze uit de volgende twee modellen:
* de Hitec HS-311 (HS-311 - Hitec RCD)
* de Hitec HS-82MG (HS-82MG - Hitec RCD)
Waarvan we de winch gebruiken om het gewicht te verplaatsen,
1 hs-82 voor het roer
1 hs-311 voor de draaibare mast (aerorig)
en dan houden we nog de optie open om met een 2e hs-82 nog iets te besturen, maar we weten nog niet wat,
eventueel nog een gyro erbij(voor na de wedstrijd) trekken we dit met een 3A bec en een 800mah accu?
morgen of overmorgen gaan we de romp nog een keer trekken, maar dan met 1mm petg, spannend of het lukt maar na het succes van deze romp hebben we er goed vertrouwen in, dit om het gewicht te besparen!
we zoeken ook nog informatie over het vormen van de zeilen?
mvg Kars
- een 4-kanaals 2.4 GHz zenderset van Jamara, inclusief aan/uit-schakelaar
- een Hitec HS-785HB zeilwinch (HS-785HB - Hitec RCD)
- voor de overige drie servo's een vrije keuze uit de volgende twee modellen:
* de Hitec HS-311 (HS-311 - Hitec RCD)
* de Hitec HS-82MG (HS-82MG - Hitec RCD)
Waarvan we de winch gebruiken om het gewicht te verplaatsen,
1 hs-82 voor het roer
1 hs-311 voor de draaibare mast (aerorig)
en dan houden we nog de optie open om met een 2e hs-82 nog iets te besturen, maar we weten nog niet wat,
eventueel nog een gyro erbij(voor na de wedstrijd) trekken we dit met een 3A bec en een 800mah accu?
morgen of overmorgen gaan we de romp nog een keer trekken, maar dan met 1mm petg, spannend of het lukt maar na het succes van deze romp hebben we er goed vertrouwen in, dit om het gewicht te besparen!
we zoeken ook nog informatie over het vormen van de zeilen?
mvg Kars
Laatst bewerkt:
pompebled
Forum veteraan
Hallo Kars,
Als ik jullie was zou ik de boot voorzien van een kielkast, zodat je verschillende kielvinnen kunt maken en gemakkelijk kunt wisselen.
Een 'beetje' gewicht onderaan een kiel bij een groot zeiloppervlak zal de boot niet overeind kunnen houden, bij een gewone rc-zeilboot is de ballastbulb al gauw 60% van het totale bootgewicht.
Het is al eerder gezegd, maar ik ben bang, dat het verplaatsen van een gewicht met een winch te traag zal gaan om de boel overeind te houden.
Groeten, Jan.
Als ik jullie was zou ik de boot voorzien van een kielkast, zodat je verschillende kielvinnen kunt maken en gemakkelijk kunt wisselen.
Een 'beetje' gewicht onderaan een kiel bij een groot zeiloppervlak zal de boot niet overeind kunnen houden, bij een gewone rc-zeilboot is de ballastbulb al gauw 60% van het totale bootgewicht.
Het is al eerder gezegd, maar ik ben bang, dat het verplaatsen van een gewicht met een winch te traag zal gaan om de boel overeind te houden.
Groeten, Jan.